RC cars use a variety of drivetrain designs to turn motor or engine power into motion, and each has its advantages and disadvantages that make them suited to particular applications. In this section, we’ll discuss various types of drivetrains, explain the lingo and give you all the info you need to know about the gears, shafts, belts and pulleys that get your car’s wheels spinning.
Drivetrain types
Whether on-road or off, RC cars drivetrains are two-wheel drive (2WD) or four-wheel drive (4WD) and use one of four different drivetrain types: direct drive; gear-reduction transmission; belt drive; or shaft drive. Let’s take a closer look at each:
- Direct drive. In a direct-drive car, there isn’t a real transmission; the spur gear is mounted directly on the drive axle, and the pinion (the gear attached to the motor) meshes with it directly. This type of drivetrain is used exclusively by pan cars, simple designs used for oval and drag racing where maximum efficiency is required. The gears are susceptible to damage from debris because they are out in the open, but because cars that use this type of drivetrain run on prepared surfaces (usually carpet or swept pavement), this is not an issue.
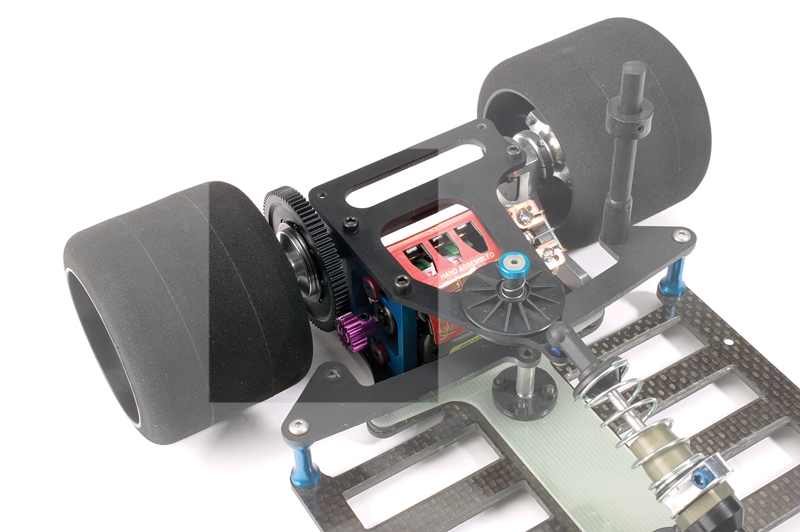
In this pan car, the motor drives the axle directly, hence the term “direct drive.”
- Gear-reduction transmission. As with full-size cars, RC cars use gear-reduction transmissions to increase the torque and reduce the rpm of the motor or engine. The amount of gear reduction is referred to as a ratio; for example, 3:1 (three to one). That means three revolutions of the input gear (where power enters the transmission) are required to turn the output gear (which drives the wheels) one revolution. The gears are enclosed in a gearbox away from harmful debris, and much like the transmission in a full-size car, in some nitro-powered vehicles, the gear train may even include a shifting mechanism to alter the gear ratio while you drive.

This Associated B4’s transmission has been opened to reveal its internal gears.
- Belt drive. Belt-driven cars replace gears with pulleys, and use cogged belts to transfer power. Belt drive is rare in off-road vehicles because belts are prone to being damaged by pebbles and sand trapped between the belt and pulleys, but it is used extensively in on-road competition cars that race on carpet or swept pavement tracks where there is little chance of debris damaging the belts.

The top deck of this Serpent nitro touring car has been removed to show off its belt-drive system.
- Shaft drive. Shaft drive is very popular for both on- and off-road 4WD vehicles. Instead of exposed belts, a shaft joins a pair of enclosed gearboxes. The gearboxes may use reduction gears, but most shaft-driven systems use a simple bevel pinion gear and a ring gear to transfer power. This makes a very lightweight and efficient drivetrain.
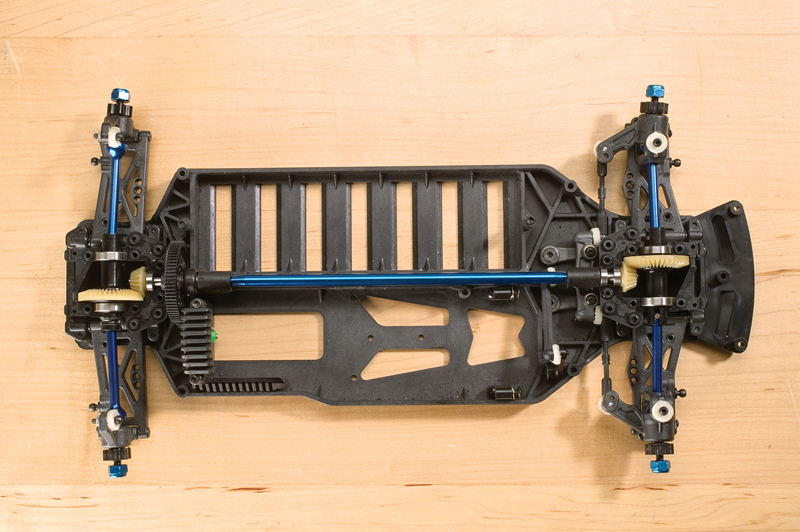
The Associated TC4’s shaft-drive system is very simple and efficient: only two gear meshes are required to drive all four wheels.
Driveshaft Types
With the exception of direct-drive cars (which have a solid rear axle), all RC cars use some type of driveshaft to transfer power to the wheels while allowing suspension movement. There are four basic types of driveshafts: dogbone, universal-joint, telescoping and CV-style.
- Dogbone. This classic RC driveshaft design is so named for its resemblance to those things Sparky likes to gnaw on. The dogbone’s ends slip into slots in the differential and stub axle’s drive cups. As the suspension articulates, the slots let the pins move freely, so power flow is not interrupted. On the plus side, dogbones are inexpensive and simple. On the downside, the sliding action of the pins in the slots increases friction and wear. Also, if your car pops a camber link, the dogbone may become lost since it isn’t fixed to the drive cups.

A Tamiya buggy’s dogbone disassembled.
- Universal joint. The universal joint (U-joint) looks and functions the same way as the joint of the same name in full-size cars. The u-joint allows the driveshaft to transfer power while articulating without the friction-prone sliding action of a dogbone and drive cup; however, u-joint driveshafts do use a dogbone and drive cup on one end because the distance between the wheels and transmission changes as the suspension moves through its travel range. To compensate, the slotted drive cup allows the driveshaft to slide in and out as the suspension operates.
Here’s a U-joint on an XRAY XB8 nitro buggy. It still has a dogbone on one end to compensate for suspension movement.
- CV-style joint. MIP popularized the CVD (Constant Velocity Drive) design that equips many high-performance RC cars. It is actually a variation on the universal joint and not a true homokinetic CV joint as found in a full-size car, but the design is popular because it operates very smoothly, is compact and easily rebuilt. Like a U-joint driveshaft, a CV-style driveshaft has a dogbone end to compensate for suspension movement—but there is another solution, as the next driveshaft type shows.

This genuine MIP-brand CVD is the original design that “CV-style” joints are patterned after.
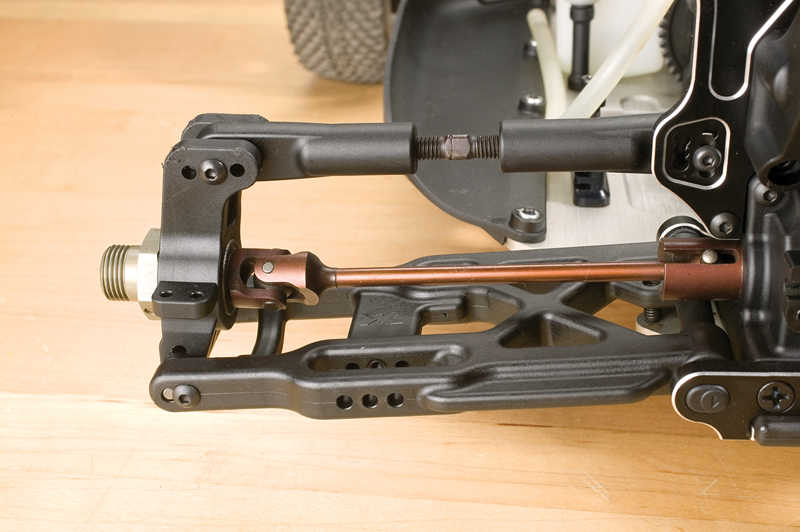
- Telescoping driveshaft. Instead of using pins moving along a slot to compensate for the changing distance between the transmission and wheels, a telescoping driveshaft actually extends and contracts as the suspension articulates. That means both ends of the driveshaft can be secured using universal joints for the ultimate in smooth power delivery. The only downside of the design other than cost and complexity is the tendency for the splined axles to bind under load and make the suspension less active. This can actually be a plus in some conditions, as it reduces suspension squatting under acceleration, but the topic is just fodder for wannabe engineers; you’ll never notice the effect when you’re playing with your RC car.

Traxxas is the king of telescoping driveshafts and uses them on all of its vehicles. Because the axle can “stretch” to compensate for suspension movement, universal joints can be fitted at both ends, as shown here on the Traxxas Jato.
The post Drivetrains & Driveshafts appeared first on RC Car Action.


